
Proposal Ideas
1. Gloves that Translates Sign Language into Audible Sound
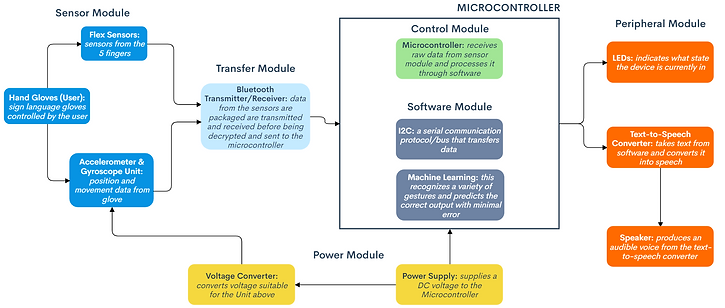
These gloves translate hand gestures into audible sound through the use of flex sensors and accelerometers. Output signals are sent to the gesture recognition software on Arduino which is processed and then forwarded to a text-to-speech-conversion module before sound is produced by a speaker.
Possible Options
Could machine learning be implemented?
Could LCD displays be included?
Customization and accessibility?
A camera to track facial expressions to imply vocal inflection?
Components
Hand Glove: Full Finger Compression Gloves ($25.00)
Flex Sensors: (5) 4.5’’ Spectra Symbol Flex Sensors ($15.95 each)
Power rating: 0.5W continous, 1W peak
Bend Resistance Range: 60K to 110K Ohms
Operating temperature: -35 to +80 °C (-31 to +176 °F)
3-axis Accelerator & Gyroscope: MPU-6065 ($29.95)
Power requirements: 2.375-3.46V, 5 μA idle, 0.5-3.9 mA active
Communication: I2C Digital-output
Operating temperature: -40 to +105 °C (-40 to +257 °F)
Microcontroller: Arduino Nano 33 BLE Sense - 3.3V/64MHz ($31.10) OR Arduino Pro Mini 328 - 5V/16MHz ($ 9.95)
Power requirements: +5 VCC, 150 mA Max, 20mA per pin
Communication: Analog Pins: 8 Digital I/Os: 14
Text-to-Speech-Conversion Module: Emic 2 ($59.95)
Power requirements: +5 VDC, 30 mA idle, 46-220 mA active
Communication: Asynchronous 9600 bps serial (8N1)
Operating temperature: -20 to +70 °C (-4 to +158 °F)
Speaker: Mini 8-ohm Speaker ($1.95)
Power requirements: 0.25-0.5V
Rated Impedance: 8 ±20% Ω (at 1KHz)
Operating temperature: -20 to +55 °C (-4 to +131 °F)
2. Robot that Detects and Extinguishes Fires
A tractor-wheeled robot that serves as demonstration for an actual fire robot (with similar logic and processing).
Navigation System
-
Robot must be able to traverse through a building without any trouble. Will have motors, sonar and IR detection.
-
Microcontroller, Gearmotor(s) & Motor Driver
Flame Detection System
-
Will use UV and IR detection to determine location of fire
-
Flame Sensor Module
Fire Extinguishing System
-
Efficient hose with enough pressure to rid of deadly fires
-
Water Pump
Housing
-
Good chassis used to house all components that complements design (Aluminum Alloy)
3. Ultrasonic Echolocation Gloves
These vibrating gloves help the blind visualize their surroundings through vibrations that varies with proximity to objects. A pulse will emit from the transceiver side of the ultrasonic module which will be read from the receiver (also on the ultrasonic sensor). This pulse will be processed and compared in the Arduino Mini Pro to a list of preset distances where the Haptic Feedback motors will only be triggered when set distances are reached.
Arduino Mini Pro 5v (FTDI 5v adapter: USB power) ($ 9.95)
-
Board Power Supply: 3.35 -12 V (5V model)
-
Circuit Operating Voltage: 3.3V or 5V
Parallax PING))) ultrasonic sensors ($ 29.95)
-
Range: 2 cm to 3 meters (~.75" to 10’)
-
Supply Voltage: 5V +/-10% (Absolute: Min 4.5V, Max 6V)
-
Supply Current: 30 mA typical, 35 mA maximum
-
3-pin interface (power, ground, signal)
-
20 mA power consumption
Hextronix HXT900 9g (2) Servo Motor ($ 3.49) OR
Arduino DRV2605L Haptic Controller (2) ($ 7.95)
Battery (5V-9V)

4. Car Seat Monitor
A camera that tracks if a baby is stuck in a car seat while the vehicle is turned off/ immobile.
5. Low-Cost Navigation HUD for Automobiles
Effective low-cost Heads-Up display (HUD) to assist drivers with navigation using Google Maps. Offers projected turn-by-turn directions with symbols, maneuvers and speed limit information.
-
Battery Conscious - keeps mobile display OFF
-
Low cost - using low powered, budget friendly micro-controllers
-
Upgrade Friendly - later add CAN-BUS support to compare speed, location and display important car data (i.e range)

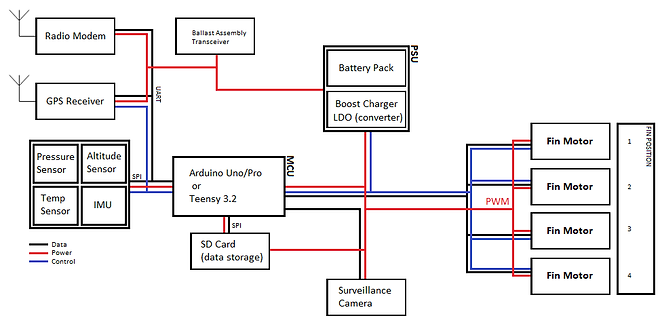
6. Controlled Reentry Weather Balloon
What: Maneuverable reentry module (MaRM) for weather balloon using four controlled fins and GPS guidance to return science module back to starting point after helium balloon pops.
Why: Current controlled descent payloads can travel more than twice the distance from launch site compared to traditional burst flights. Reception of telemetry from radiosondes may be curtailed prematurely if balloon travels a long distance from the launch site.
How: Use double balloon technique to lift payload while second smaller balloon acts as parachute and prevents pendulum motion during ascent. At or right before balloon burst, enable grid fins and stabilize payload. During descent use onboard sensor data from: Gyroscope, Pressure / Altitude / Temperature Sensor, GPS and IMU (Inertia Measurement Unit) to utilize grid fins as control surfaces to help "steer" payload back to launch site.
Benefits: Convenience - no longer have to track and locate module after return. Scaling - can use technology for larger varying payloads
Why not use a Guided Parafoil (NASA/Navy 2014)?
-
Tendency for the system to develop flat spin, where payload & para foil ‘orbit’ each other at a high speed, proving to be unrecoverable.
-
Parafoil did not inflate due to low air density. The lines get tangled easily
7. Space Flight Program Control Station
Simulation Control Station for Rocket Powered space flight. Consists of switches, displays and rotational hand controller to simulate space flight launches and orbital maneuvers.
-
Convenience - simulate launches, orbital docking maneuvers, orbit changes and more using controls used in space craft.
-
Cost - Low cost simulation alternative
-
Upgrade Friendly - ability to add displays for ease of readability or simplification of flight controls.
